实验2 压力单闭环控制实验
一、实验目的
1、熟悉单回路压力控制系统的组成。
2、了解压力传感器的结构及其使用方法。
3、研究PID调节器对系统的控制效果。
二、实验设备
1、实验系统

图2-1 仿真系统界面
三、实验原理
单闭环控制系统的一个主要优点是输出量(被控制量)经检测元件检测后反馈到系统的输入端与给定值相比较,所得的偏差信号经调节器处理后变成一个对被控过程控制的信号,从而实现被控制量排除系统内外扰动的影响而保持基本不变的目的。图3-2所示的压力控制系统就是这样一种系统。该系统的输出随着给定量的大小而变化。
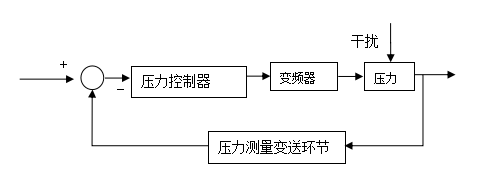
图2-2 压力单闭环控制系统方框图
压力控制系统的控制质量完全取决于所用调节器的结构和参数。比例调节器是调节比例度δ来实现对系统的控制。一般言之,δ越小,系统的余差也越小,但超调量等动态性能指标变差。反之,δ越大,系统的余差也越大,系统的动态过程缓慢,超调量变小。比例积分(PI)调节器产生的控制作用有2 个部分:与偏差成比例部分和偏差的积分部分。由于积分的作用,可使系统无余差产生,但积分时间常数不能太小,否则会使系统的动态性能变差,甚至会不稳定。 比例积分微分(PID)调节器既可以实现系统无余差, 又能改善系统的稳定度和响应的快速性,其可调参数有3 个:δ、Ti 和Td。
四、 实验内容与步骤
1、在PID控制器中单击“参数”,设置PID参数值;
2、设置压力设定值;
3、开启热水泵M101,开始记录数据;
4、如需重新开始,可点击“清除曲线”按钮,关闭热水泵M101,重复以上步骤;
5、记录调节过程中的参数:
表2-1 实验记录表
实验次数 | 调节器参数 | 性能指标 | |||
|
|
|
|
| |
1 | |||||
2 | |||||
3 | |||||
4 | |||||
五、注意事项
控制要求:超调量σ<50%,调节时间ts<20s。
六、实验总结
1、画出压力单闭环控制系统的阶跃响应曲线图(截图可另附页);
2、说明调节PID参数的过程。