实验4 串级控制系统设计及控制器参数整定实验
一、实验目的
1、掌握串级控制系统的工程设计方法。
2、掌握串级控制系统整定方法。
3、了解串级控制系统的特点。
二、实验设备
计算机一台,MATLAB软件
三、实验原理
1、串级控制系统含义
串级控制系统是两只调节器串联起来工作,其中一个调节器的输出作为另一个调节器的给定值的系统。该系统主要应用于:对象的滞后和时间常数很大、干扰作用强而频繁、负荷变化大、对控制质量要求较高的场合。
2、串级控制系统方框图
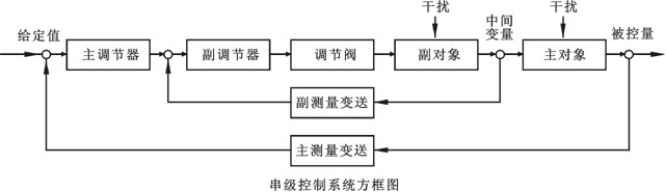
3、串级控制系统特点
(1)在系统结构上,它是由两个串接工作的控制器构成的双闭环控制系统;
(2)系统的目的在于通过设置副变量来提高对主变量的控制质量;
(3)由于副回路的存在,对进入副回路的干扰有超前控制的作用,因而减少了干扰对主变量的影响;
(4)系统对负荷改变时有一定的自适应能力。
4、串级控制系统调节器的工程整定方法
工程实践中,串级控制系统常用的参数整定方法有逐次逼近法、两步整定法和一步整定法。
(1)逐次逼近法
逐次逼近法是在主回路断开的情况下,对副调节器进行整定,而后将副调节器的参数设置在所求数值上,再闭合主回路求取主调节器的整定参数,再将调节器的参数设置在所求数值上进行整定,求出第二次副调节器的整定参数。如此反复,直至求得满足控制品质的参数为止。这种方法费时较多,因此在工程实践中的应用逐渐减少。
(2)两步整定法
两步整定法即是分两步来整定参数,先整定副回路参数,然后将副回路视为主回路的一个环节,再整定主回路参数。之所以在这一过程中可以忽略主调节器参数变化对副回路的影响,是因为副回路是为提高主回路控制质量而设置的,系统对主变量的控制要求很高、很严,对副变量的控制要求却比较低。
两步整定法的具体步骤为:
①工况稳定时,主、副回路均闭合,均采用纯比例作用,将主调节器的比例度δ1设置为100%。按照单回路控制系统的衰减(如4:1)曲线法整定副回路,逐渐减小副回路的比例度δ2,直到出现4:1振荡过程。记下此时副调节器的比例度δ2s和衰减振荡周期T2s。
②将副调节器比例度固定在δ2s,把副回路视为主回路的一个环节,逐渐减小主调节器的比例度,当主回路达到4:1衰减振荡过程时,记下主调节器的比例度δ1s和衰减振荡周期T1s。
③根据得到的δ2s、T2s、δ1s、T1s,按单回路控制系统衰减曲线法整定公式来计算主、副调节器的比例度δ、积分时间TI和微分时间TD。
④按“先副后主”、“先比例次积分后微分”的顺序,设置主、副调节器的参数,再根据扰动实验,对参数进行必要的调整。
(3)一步整定法
一步整定法是将副调节器参数根据经验值一次整定好,然后将副调节器视为一个普通的纯比例环节,按照单回路系统的整定方法整定主调节器参数。如果在整定过程中出现振荡,只需加大主、副调节器中任一比例度值即可消除。倘若振荡过于剧烈,可先切换至手动,待生产稳定后,再重新投入,重新整定。
四、实验步骤:
(包含:运行MATLAB应用程序及Simulink仿真软件在控制器参数整定中的具体步骤)。
1、设被控对象的传递函数为:![]() ,要求被调量始终维持在设定值。设计一个串级控制系统,在simulink中绘出系统框图;
,要求被调量始终维持在设定值。设计一个串级控制系统,在simulink中绘出系统框图;
2、要求控制系统的衰减率为70%,静态误差为零。调节PID控制器的参数,获得要求的控制效果。
五、实验总结
1、实验求出系统在PID调节器控制下的余差和超调量;
2、作出流量的阶跃响应曲线。