实验二 离散化方法研究实验
1. 实验目的
(1)学习并掌握数字控制器的设计方法;
(2)熟悉将模拟控制器D(S)离散为数字控制器的原理与方法;
(3)通过数模混合实验,对D(S)的多种离散化方法作比较研究,并对D(S)离散化前后闭环系统的性能进行比较,以加深对计算机控制系统的理解。
2. 实验设备
计算机、Proteus仿真软件、Keil编程软件。
3. 实验原理
由于计算机的发展,计算机及其相应的信号变换装置(A/D和D/A)取代了常规的模拟控制。在对原有的连续控制系统进行改造时,最方便的办法是将原来的模拟控制器离散化,其实质是将数字控制部分(A/D、计算机和D/A)看成一个整体,它的输入与输出都是模拟量,因而可等效于一个连续的传递函数D(S)。这样,计算机控制系统可近似地视为以D(S)为控制器的连续控制系统。
下面以一个具体的二阶系统来说明D(S)控制器的离散化方法。
(1)二阶系统的原理框图如图2-1所示。
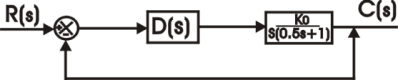
图2-1 二阶对象的方框图
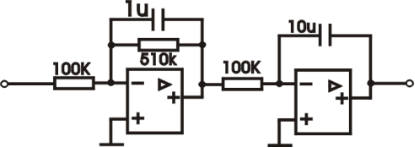
图2-2 二阶对象的模拟电路图
(2)系统性能指标要求
系统的速度误差系数Kv≥5,超调量δ≤10%,系统的调整时间ts≤1s
据Kv要求可得:
![]()
![]()
令![]() ,则校正后的开环传递函数为
,则校正后的开环传递函数为

由上式得![]() ,取
,取![]() ,则
,则![]()
![]()
所以校正后系统的模拟电路图如下图所示。

图2-3 校正后二阶系统的模拟电路图
 ,为使校正后的Kv=5,要求对象K由5增至10。
,为使校正后的Kv=5,要求对象K由5增至10。
![]() ,
,![]()
![]() ,
,![]() ,
,![]()
(3)D(s)的离散化算法

图2-4 数—模混合控制的方框图
传递函数与Z传递函数间的相互转换,可视为模拟滤波器与数字滤波器之间的转换。常用的转换方法有:
a) 阶跃响应不变法(或用脉冲响应法)
b) 后向差分法
c) 双线性变换
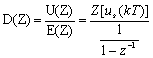
1) 阶跃跃响应不变法
![]()
![]()
![]()
![]() -数字滤波器在阶跃作用下输出响应的
-数字滤波器在阶跃作用下输出响应的![]()
![]() -模拟滤波器在阶跃作用下输出响应的采样值
-模拟滤波器在阶跃作用下输出响应的采样值![]()
![]() ,
,
![]()
![]()
![]()
据此得

即 ![]() ×0.45
×0.45
2) 后向差分法
令 ![]() ,
,![]()
![]()
后向差分S与Z之间关系为:
![]() ,代入D(S)表达式中得
,代入D(S)表达式中得
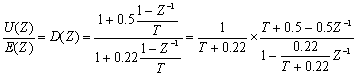
于是得
![]()
3) 双线性变换
由泰勒级数得 ![]() ,
,![]()
 ,代入D(s)得
,代入D(s)得
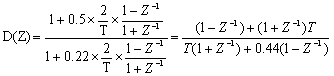

即 ![]()
4. 实验操作
(1)模拟控制器测试
①参照图2-2,搭建二阶被控对象的模拟电路,所选元件见表2-1:
表2-1 实验元件列表1
元件名称 | 关键字 | 库 | 参数 |
电阻 | RES | DEVICE | 根据原理图选择 |
电容 | CAP | DEVICE | 根据原理图选择 |
放大器 | OPAMP | DEVICE | 无 |
②参考图2-3,去除D(S)控制器,绘出无校正时的电路图;
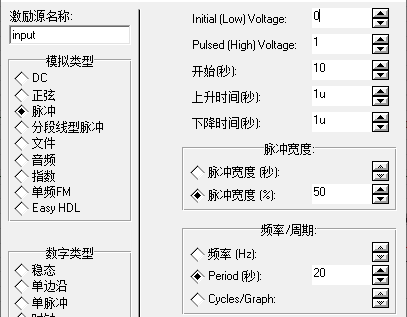
③在“激励源”模式中,选择以脉冲信号(PULSE)作为输入,按下图进行设置。在输出端放置电压探针;
④在“图表模式”中选择“ANALOGUE”,在空白处绘制一个图表。单击右键,选择“添加曲线”,分别选择输入和输出信号;
⑤在图表上单击右键,选择“编辑图表”,设置开始时间为10、结束时间为20,绘出被控对象无校正时的阶跃响应曲线;
⑥选择“模板/从其他设计导入风格”,选择实验一的工程进行颜色设置。将需要保存的电路图和图表复制粘贴到实验报告中。
⑦参考图2-3,加入D(S)控制器,按照同样的方法绘出加入正装置后的响应曲线,比较被控对象在加入模拟控制器前后的响应曲线,将参数记录在表2-2中。
(2)数字控制器测试
①原被控对象不变,将模拟控制器更换为单片机及接口电路构成的数字控制器(参考实验一电路图);
②按照实验原理中的阶跃响应不变法,修改实验一中的单片机程序并仿真运行,选择合适的采样周期,绘出被控对象在加入数字控制器后的响应曲线,与模拟控制器响应曲线进行对比,将参数记录在表2-2中。
表2-2 不同情况下响应曲线参数
实验项目 | 超调量σ% | 调节时间Ts(5%) |
无校正 | ||
模拟控制器 | ||
数字控制器(T= ) | ||
数字控制器(T= ) | ||
数字控制器(T= ) |