实验三 数字PID调节器算法的研究
1. 实验目的
(1)学习并熟悉常规的数字PID控制算法的原理;
(2)学习并熟悉积分分离PID控制算法的原理;
(3)掌握具有数字PID调节器控制系统的实验和调节器参数的整定方法。
2. 实验设备
计算机、matlab 仿真软件、Proteus仿真软件、Keil编程软件。
3. 实验原理
在工业过程控制中,应用最广泛的控制器是PID控制器,它是按偏差的比例(P)、积分(I)、微分(D)组合而成的控制规律。而数字PID控制器则是由模拟PID控制规律直接变换所得。
在PID控制规律中,引入积分的目的是为了消除静差,提高控制精度,但系统中引入了积分,往往使之产生过大的超调量,这对某些生产过程是不允许的。因此在工业生产中常用改进的PID算法,如积分分离PID算法,其思想是当被控量与设定值偏差较大时取消积分控制;当控制量接近给定值时才将积分作用投入,以消除静差,提高控制精度。这样,既保持了积分的作用,又减小了超调量。
(1)被控对象的模拟与计算机闭环控制系统的构成

图3-1 数-模混合控制系统的方框图
被控对象的传递函数为:
![]()
它的模拟电路图如下图所示
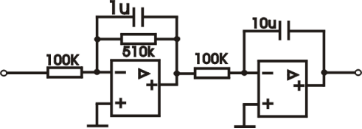
图3-2 被控二阶对象的模拟电路图
(2)常规PID控制算法
常规PID控制位置式算法为
![]()
对应的Z传递函数为
![]()
![]()
式中Kp---比例系数
Ki=![]() 积分系数,T采样周期
积分系数,T采样周期
Kd=![]() 微分系数
微分系数
其增量形式为
![]()
(3)积分分离PID控制算法
系统中引入的积分分离算法时,积分分离PID算法要设置分离阈E0:
当 │e(kT)│≤│E0│时,采用PID控制,以保持系统的控制精度。
当 │e(kT)│>│E0│时,采用PD控制,可使δp减小。积分分离PID控制算法为:
![]()
式中Ke称为逻辑系数:
当 │e(k)│≤│E0│时, Ke=1
当 │e(k)│>│E0│时, Ke=0
对应的控制方框图为

图3-3 单片机控制的方框图
4. 实验操作
(1)数字PID控制器测试
①在proteus中绘制被控对象电路图,使用单片机及接口电路构成的数字控制器(参考实验二电路图)进行控制,输入信号及图表设置方法与实验二相同;
②编写单片机程序并运行,调整PID参数直到响应曲线满足控制要求,将参数记录到表3-2中,并绘出响应曲线;
③修改程序,实现积分分离PID控制算法,绘出响应曲线,比较积分分离PID与常规PID在性能上的区别。
表3-2 实验数据记录
实验项目 | 控制器参数 | 响应曲线参数 | |||
Kp | Ki | Kd | 超调量σ% | 调节时间Ts | |
纯比例P | |||||
比例积分PI | |||||
比例积分微分PID | |||||
积分分离PID | |||||