实验四 最少拍控制算法研究
1. 实验目的
(1)学习并熟悉最少拍控制器的设计和算法;
(2)研究最少拍控制系统输出采样点间纹波的形成;
(3)熟悉最少拍无纹波控制系统控制器的设计和实现方法。
2. 实验设备
计算机、matlab 仿真软件。
3. 实验原理
在离散控制系统中,通常把一个采样周期称作一拍。最少拍系统,也称为最小调整时间系统或最快响应系统。它是指系统对应于典型的输入具有最快的响应速度,被控量能经过最少采样周期达到设定值,且稳态误差为定值。显然,这样对系统的闭环脉冲传递函数ϕ(z)提出了较为苛刻的要求,即其极点应位于Z平面的坐标原点处。
(1)最少拍控制算法
实验系统被控对象的传递函数为:
![]()
其模拟电路图为:
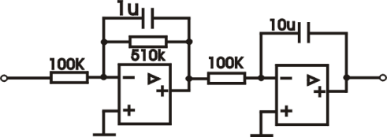
图4-1 二阶被控对象的模拟电路图
计算机控制系统的方框图为:

图4-2 最少拍计算机控制原理方框图
根据上述方框图可知,有限拍系统的闭环脉冲传递函数为:
![]() (1)
(1)
![]() (2)
(2)
由(1) 、(2)解得:
![]()
随动系统的调节时间也就是系统误差![]() 达到零或为一恒值所需的时间,由Z变换定义可知:
达到零或为一恒值所需的时间,由Z变换定义可知:![]()
有限拍系统就是要求系统在典型的输入信号作用下,当![]() 时,
时,![]() 恒为零或恒为一常量。N为尽可能小的正整数,为了实现这个目标,对不同的输入信号,必须选择不同的
恒为零或恒为一常量。N为尽可能小的正整数,为了实现这个目标,对不同的输入信号,必须选择不同的![]() 传递函数,由理论分析得:
传递函数,由理论分析得:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
(2)等速输入下最少拍控制器的设计
对于一二阶受控对象加零阶保持器后对象的传递函数为:
![]()
选择采样周期T,将上述传递函数离散后得
![]() (3)
(3)
因为输入是单位斜坡信号,所以选择:
![]()
![]()
![]()
![]() (4)
(4)
其中 ![]() ,
,![]()
由此可得等速输入下最少拍算法的控制量为
u(k)=(1-B)u(k-1)+Bu(k-2)+![]() (5)
(5)
按等速输入下最少拍无差系统设计的控制器,在等速输入可使闭环系统的输出在第二拍(即两个采样周期)跟上,此后在采样点上达到无差。但对于其它典型输入的适应性较差。
4. 实验操作
(1)等速输入下最少拍控制器的设计
采样周期T=0.5s,根据(5)式计算等速输入下最少拍算法的控制量为:
u(k)=
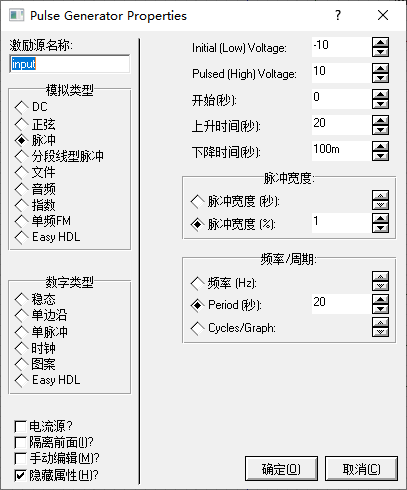
编写程序,在proteus中进行仿真,并绘出斜坡响应曲线。输入信号设置参考下图: